


































.webp)








Sepeda motor di seluruh dunia saat ini ditawarkan dengan sistem penggerak roda belakang. Berbeda dengan mobil yang banyak menggunakan penggerak roda depan atau kombinasi roda depan dan belakang. Apa alasannya motor tak pakai penggerak roda depan?
Dikutip Zing, di masa lalu ada sepeda motor berpenggerak roda depan sekitar tahun 1938 yang dikembangkan oleh lima insinyur yang disebut Killinger and Freund Motorcycle. Motor itu menggunakan mesin dua tak berkapasitas 600 cc. Proyek itu merupakan versi upgrade dari motor asal Jerman, Megola.
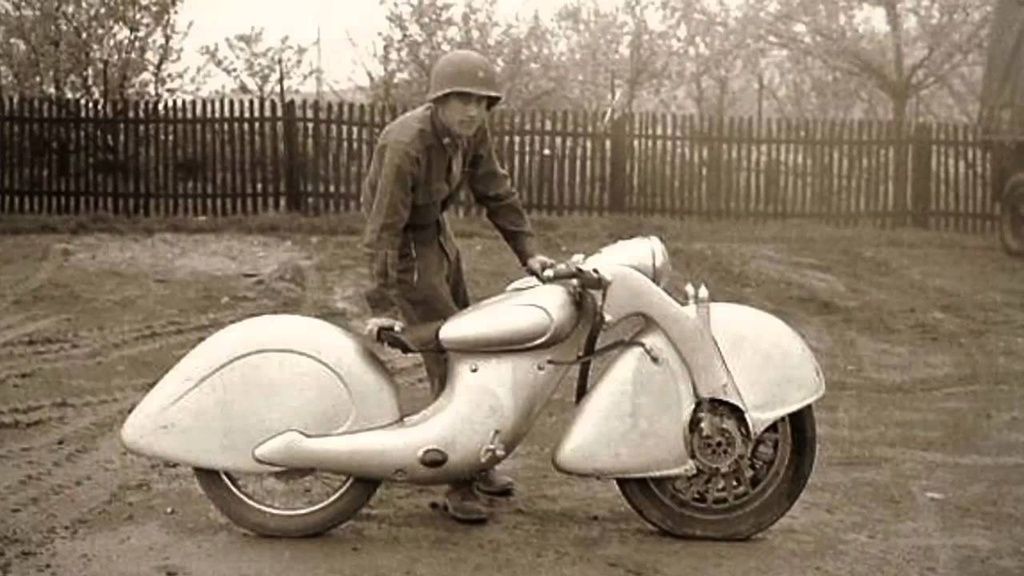 Motor Berpenggerak Roda Depan yang Dikembangkan Killinger and Freund Motorcycle Foto: Istimewa Motor Berpenggerak Roda Depan yang Dikembangkan Killinger and Freund Motorcycle Foto: Istimewa |
Setelah proyek motor berpenggerak roda depan Megola dihentikan, pabrikan motor tersebut tidak terlalu tertarik dengan proyek ini. Sebab, desain penggerak roda depan pada sepeda motor memiliki banyak kelemahan dibanding kelebihan yang dimilikinya.
SCROLL TO CONTINUE WITH CONTENT
Tidak seperti mobil, sepeda motor yang cenderung memiliki dimensi kecil. Kalau desain roda depan mengambil peran menjadi pengarah (untuk berbelok) dan penggerak (untuk berjalan), maka akan membuat motor kehilangan fleksibilitas. Selain itu, motor berpenggerak roda depan juga membutuhkan bagian mekanis yang lebih kompleks sehingga meningkatkan biaya produksi.
Baca juga: Bagaimana Cara Motor MotoGP Diservis? |
Desain penggerak roda depan pada sepeda motor dapat menyebabkan roda depan selip saat melakukan akselerasi mendadak. Sebab, gaya inersia akan menyebabkan motor cenderung fokus ke bagian belakang.
Selain itu, peran roda depan sebagai pengarah kendaraan pada mobil dan motor juga berbeda. Mobil bisa membelokkan roda depan tanpa memiringkan rodanya. Tapi motor, biasanya untuk berbelok akan sedikit miring. Dengan asumsi roda depan memiliki dua peran sebagai penggerak dan pengarah, maka pengemudi motor berpenggerak roda depan akan sulit mengendalikannya.
(rgr/lth)








Komentar Terbanyak
Resmi Turun, Ini Harga BBM Se-Indonesia Juli 2026
Sah! Malaysia Perketat Impor Mobil Murah China
Penunggak Pajak Kendaraan Dilarang Beli BBM Subsidi